Joints
joints
https://docs.coronalabs.com/guide/physics/physicsJoints/index.html
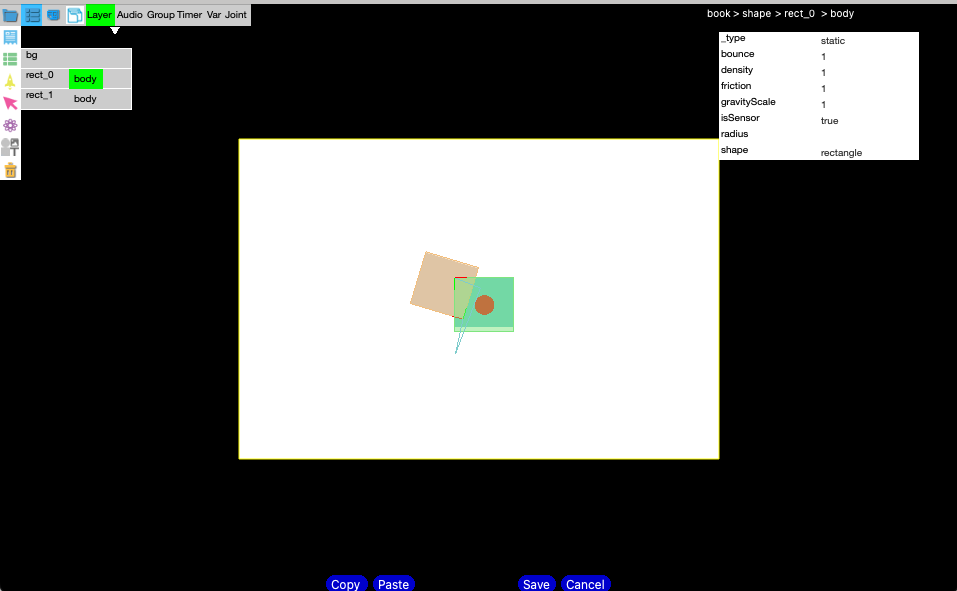
pivot
bodyA
bounce = 1
density = 1
friction = 1
gravityScale = 1
isSensor = true
radius = 0 –0 means use object width/2 if cirlce is selected
shape =“rectangle”, – “circle”, – rectangle, path
type = “static” – kinematic, static, dynamic
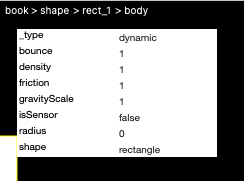
bodyB
bounce = 1
density = 1
friction = 1
gravityScale = 1
isSensor = false
radius = 0, –0 means use object width/2 if cirlce is selected
shape =“rectangle”, – “circle”, – rectangle, path
type = “dynamic”, – kinematic, static, dynamic
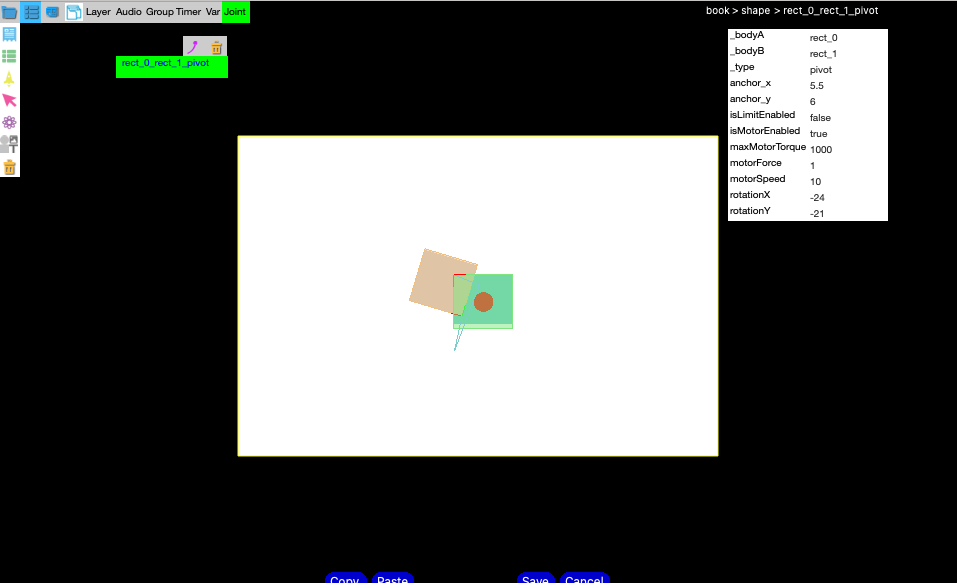
joint A B
- bodyA = "rect_0"
- bodyB = "rect_1"
- type = "pivot", --pistoin, distance, pulle, + defaultSet
- anchor_x = rect_0.x + rect_0.width/2
- anchor_y = rect_0.y + rect_0.height/2
- isMotorEnabled= true
- maxMotorTorque = 1000
- motorForce = 1
- motorSpeed = 10
- isLimitEnabled = false
- rotationX = rect_0.x
- rotationY = rect_0.y
Handoff: Physics Joint Anchors vs Scale (App/physics)
Confirmed Findings
Solar2D/main.luacurrently hasenv.props.scale = 1.- If this is changed to
2, thenkwikGlobal.scale-based anchor formulas in joint files double their width/height offsets. - Ellipse/circle objects should use
anchorX, anchorY = 0.5, 0.5for center-based joint anchors. - Rectangle objects with
anchorX, anchorY = 0, 0are fine as long as joint anchors addwidth/2andheight/2(or scaled equivalents).
How Scale=2 Affects Joint Anchor Coordinates
For joints that compute center from top-left anchors using:
obj.x + obj.width * kwikGlobal.scale * 0.5
obj.y + obj.height * kwikGlobal.scale * 0.5changing env.props.scale from 1 to 2 doubles the local offset term:
- scale=1:
obj.x + obj.width * 0.5 - scale=2:
obj.x + obj.width * 1.0
So anchor points move farther from the top-left anchor when scale is increased.
For joints using direct center-positioned objects (anchor=0.5,0.5) and anchor_x = ellipse.x, scale does not appear explicitly in the formula.
Joint Anchor Report (All Joint Files in App/physics/components/*/joints)
| Joint file | Type | Anchor points passed to physics.newJoint | Uses kwikGlobal.scale |
|---|---|---|---|
components/distance/joints/rect_0_rect_1_distance.lua | distance | anchorA=(rect_0.x + rect_0.width*kwikGlobal.scale*0.5, rect_0.y + rect_0.height*kwikGlobal.scale*0.5), anchorB=(rect_1.x + rect_1.width*kwikGlobal.scale*0.5, rect_1.y + rect_1.height*kwikGlobal.scale*0.5) | Yes |
components/friction/joints/rect_0_rect_1_friction.lua | friction | anchor=(rect_1.x + rect_1.width*kwikGlobal.scale*0.5, rect_1.y + rect_1.height*kwikGlobal.scale*0.5) | Yes |
components/piston/joints/rect_0_rect_1_piston.lua | piston | anchor=(rect_1.x + rect_1.width*kwikGlobal.scale*0.5, rect_1.y + rect_1.height*kwikGlobal.scale*0.5) | Yes |
components/pivot/joints/rect_0_rect_1_pivot.lua | pivot | anchor=(rect_0.x + rect_0.width*kwikGlobal.scale*0.5, rect_0.y + rect_0.height*kwikGlobal.scale*0.5) | Yes |
components/pulley/joints/rect_0_rect_1_pulley.lua | pulley | groundA=(rect_0.x + rect_0.width*kwikGlobal.scale*0.5, rect_0.y + rect_0.height*kwikGlobal.scale*0.5 - 100), groundB=(rect_1.x + rect_1.width*kwikGlobal.scale*0.5, rect_0.y + rect_0.height*kwikGlobal.scale*0.5 - 100), bodyA=(rect_0.x + rect_0.width*kwikGlobal.scale*0.5, rect_0.y + rect_0.height*kwikGlobal.scale*0.5), bodyB=(rect_1.x + rect_1.width*kwikGlobal.scale*0.5, rect_1.y + rect_1.height*kwikGlobal.scale*0.5) | Yes |
components/rope/joints/rect_0_rect_1_rope.lua | rope | offsetA=(25*kwikGlobal.scale, 25*kwikGlobal.scale), offsetB=(25*kwikGlobal.scale, 25*kwikGlobal.scale) | Yes |
components/touch/joints/rect_0_touch.lua | touch | anchor=(rect_0.x + rect_0.width*kwikGlobal.scale*0.5, rect_0.y + rect_0.height*kwikGlobal.scale*0.5) | Yes |
components/weld/joints/rect_0_rect_1_weld.lua | weld | anchor=(rect_0.x + rect_0.width*kwikGlobal.scale*0.5, rect_0.y + rect_0.height*kwikGlobal.scale*0.5) | Yes |
components/wheel/joints/rect_0_ellipse_0_wheel.lua | wheel | anchor=(ellipse_0.x, ellipse_0.y) | No (direct) |
components/wheel/joints/rect_0_ellipse_1_wheel.lua | wheel | anchor=(ellipse_1.x, ellipse_1.y) | No (direct) |
components/gear/joints/rect_0_gearL_pivot.lua | pivot | anchor=(gearL.x, gearL.y) | No (direct) |
components/gear/joints/rect_0_gearR_pivot.lua | pivot | anchor=(gearR.x, gearR.y) | No (direct) |
components/gear/joints/rect_0_rect_1_piston.lua | piston | anchor=(rect_1.x + rect_1.width/2, rect_1.y + rect_1.height/2) | No |
components/gear/joints/gearL_gearR_gear.lua | gear | no anchor coordinates (links two existing joints: rect_0_gearL_pivot, rect_0_gearR_pivot) | No |
components/gear/joints/gearR_rect_1_gear.lua | gear | no anchor coordinates (links two existing joints: rect_0_gearR_pivot, rect_0_rect_1_piston) | No |
Anchor Settings of Referenced Objects (Wheel + Gear)
| Object file | Shape | anchorX, anchorY |
|---|---|---|
components/wheel/layers/rect_0.lua | rectangle | 0, 0 |
components/wheel/layers/ellipse_0.lua | ellipse/circle | 0.5, 0.5 |
components/wheel/layers/ellipse_1.lua | ellipse/circle | 0.5, 0.5 |
components/gear/layers/rect_0.lua | rectangle | 0, 0 |
components/gear/layers/rect_1.lua | rectangle | 0, 0 |
components/gear/layers/gearL.lua | ellipse/circle | 0.5, 0.5 |
components/gear/layers/gearR.lua | ellipse/circle | 0.5, 0.5 |
Recommendation
- Keep ellipses/circles at
anchorX, anchorY = 0.5, 0.5(recommended). - Avoid
anchor=0,0for circles when using center-based wheel/pivot anchors. - Rectangles with
anchor=0,0are valid and already handled correctly by explicit center offsets in joint formulas.